

Kinodynamic RRT
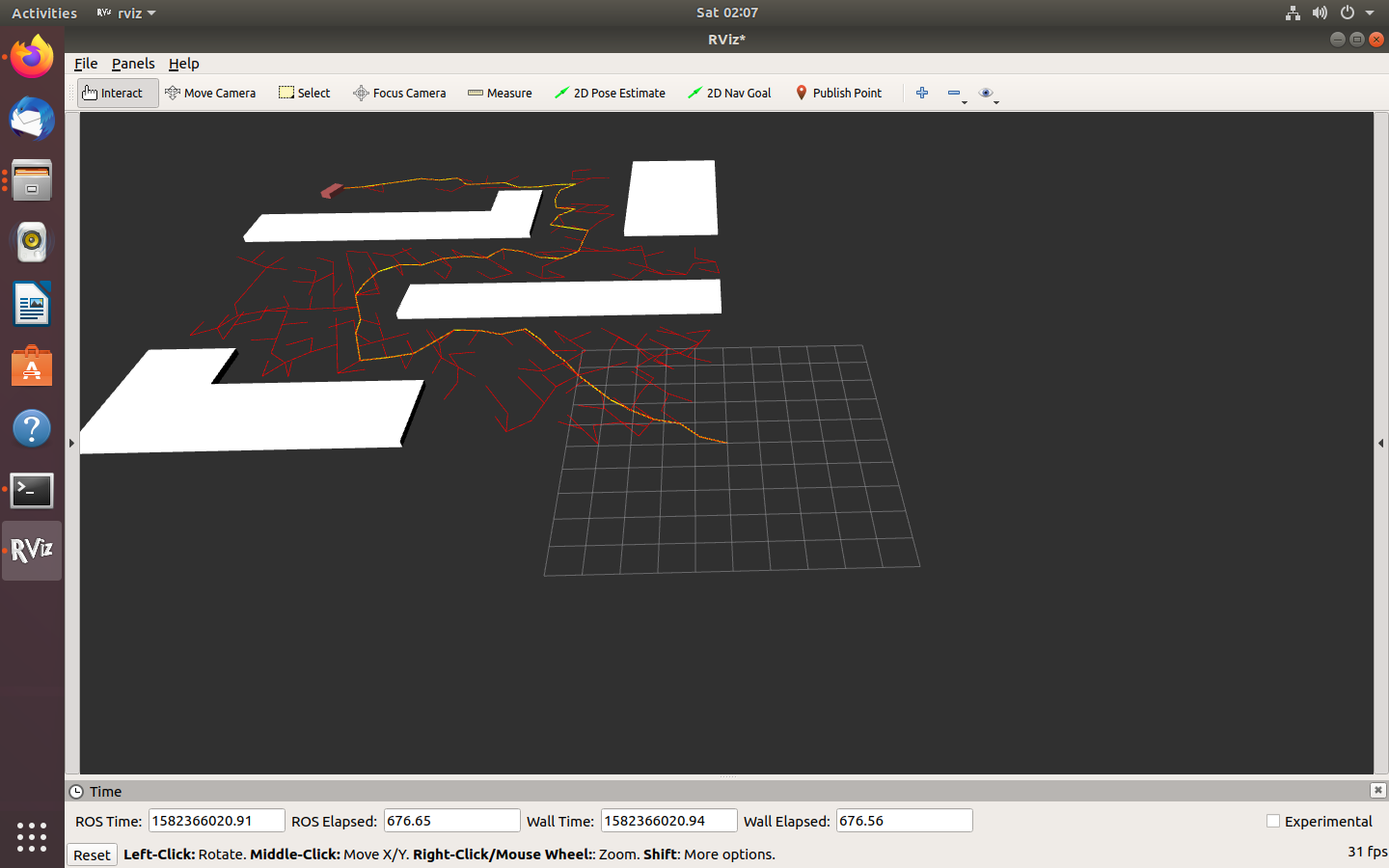
In this project, we developed a kinodynamic planner for the RRT algorithms based on ROS. It was tested and visualized in rviz. The algorithm has improved time complexity, i.e., it takes less time to trace the shortest collision-free path. We have successfully deployed this algorithm by modifying it for the UR5 robotic arm. Please click here to find the algorithm in action.

